
ミニチュア造成地を作り、ラジコン重機を低遅延遠隔操作する。狭い空間に配線する工作技術が向上したことと、インターネットに接続するネットワーク構築の重要性に気づく。

遠隔操作技術の研究開発から林業DXへ。VISPELLが歩んできた軌跡を、Xでの発信記録とともにご紹介します。
開発室に砂を200kg入れ、1/12ラジコン重機をインターネット経由で遠隔操作するところから開発が始まりました。遠隔操作システムは本物の重機に応用され、低遅延インターネット経由遠隔操作を実現。受託開発として建材用PE大型3Dプリンターを開発
ミニチュア造成地を作り、ラジコン重機を低遅延遠隔操作する。狭い空間に配線する工作技術が向上したことと、インターネットに接続するネットワーク構築の重要性に気づく。
産業用機械の受託開発のひとつ。ポリエチレン(PE)の成形をする大型3Dプリンターを開発。産業廃棄物処分場の防水処理で使われる遮水工事での利用を想定。排水管や支柱、面の変化点といった防水シートの接続が難しい部分をその形状をスキャンし3Dプリンターで形状にぴったり合った部品を出力する。

製造中の様子
1つのカメラの映像を見ながら遠隔操作をすると、前後の遠近感がわからず物を掴む動作に時間がかかることがわかる。その解決策として3D(立体視)映像のストリーミング配信の開発に着手した。3D映像配信で難しいことは、カメラが2つあるため2倍の映像をどのようにネットワークへ配信するか、3D酔いの緩和、急速に変化する3D視聴デバイスの対応となる。
VRグラスを使ってラジコン操作をする様子
重機側の振動や傾きをフィードバックする操縦席の開発。パートナー企業との共同開発。
フィードバック付き遠隔システムは大学へ提供された
タワークレーン自動運転の研究にGPS(GNSS)測位技術の専門家として参加。ドローンLiDAR製品を開発販売する会社で役員として業務を担っていたキャリアを活かした

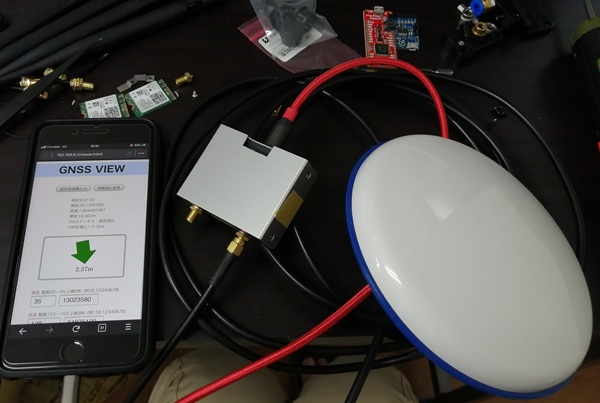
RTK-GNSS測位を利用した高精度な位置誘導システムの開発。杭打ちでの利用。ESP32とF9Pモジュールを使用することで安価で小さな装置を製作した。操作はスマートフォンのブラウザで行う。
日本のGPSであるみちびきQZSSのセンチメータ級測位補強サービスCLASの測位特性テスト。内閣府実証事業「ちびきを利用した実証事業」の採択をうけて。
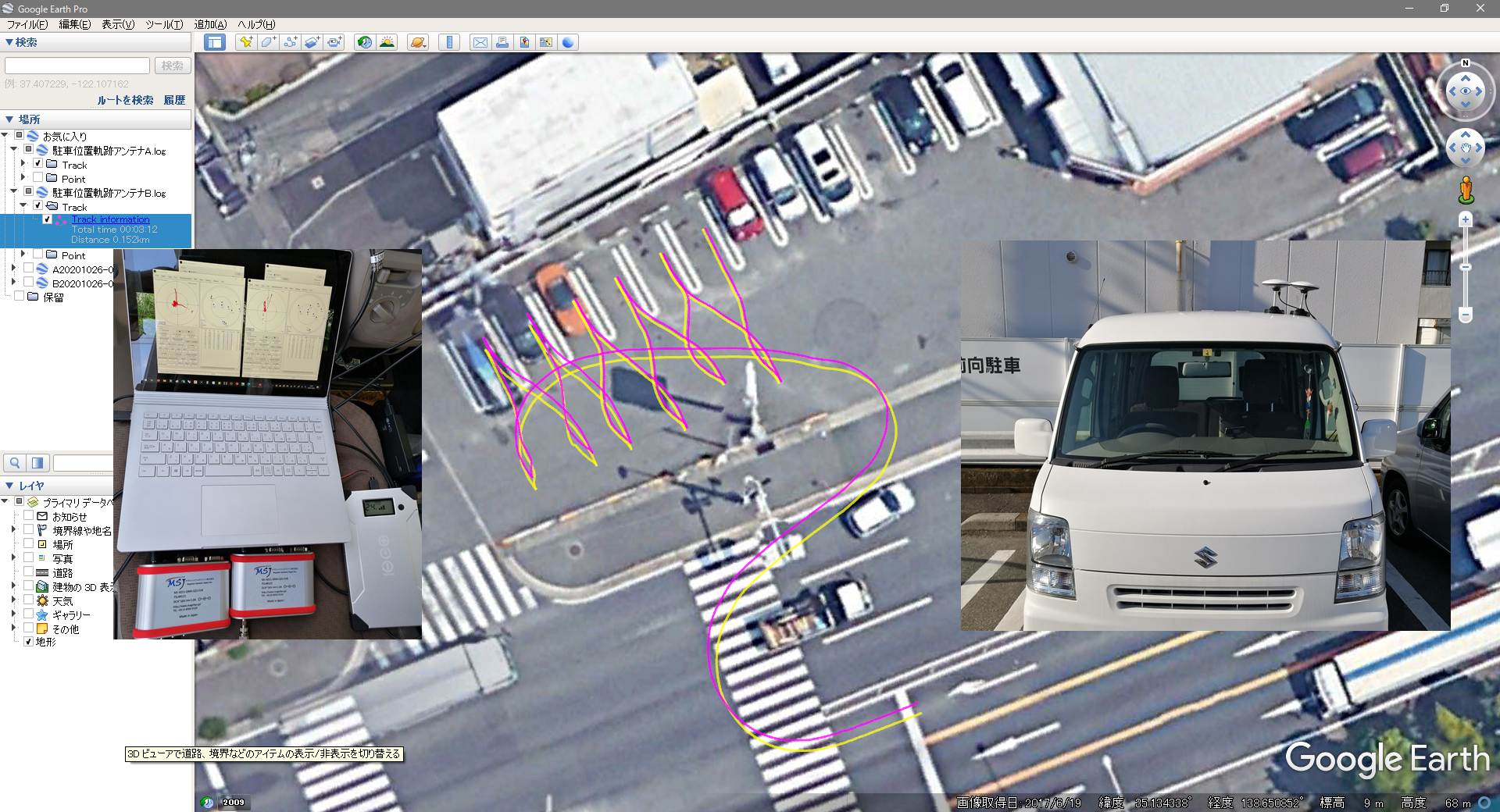
2つのアンテナ間距離が固定された状態で駐車を繰り返し、2つの測位座標がどのように変化するかGoogle衛星写真にマッピングしたもの
2020年に取り組んだ開発を引き続きブラッシュアップと、みちびき実証事業にて自動運転にチャレンジしました。
みちびきを利用した実証事業
「油圧ショベルとダンプトラックによる残土搬出の協調自動化におけるみちびき利用可能試験」
みちびき PPP-RTK受信機2個を油圧ショベルの屋根に対角で
設置し、機体の向きをセンチオーダー精密測位で座標を求める
トラックにも同じく2個のみちびきPPP-RTK受信機2個を設置して
油圧ショベルの隣に停止したら、前方の土をLiDARで認識した上で
土を救い取り、トラックの荷台へこぼすという自動化処理です。
油圧ショベルの各関節には、オリジナルで製作した安価な角度センサーや加速度センサーを取り付け、ICT化の精度を確認しました。
照明のない地下空間で周囲を照らすため、ドローンをカスタマイズして空飛ぶ投光器にしました。
2021年2月25日、内閣府みちびきを利用した実証試験を静岡県富士市で実施しました。
— VISPELL LLC (@vispellllc) February 25, 2021
翌日朝刊の #静岡新聞 社会面で本試験の記事が掲載されております。青島記者の的確な記事に感謝でございます。#建機 #自動運転 #自律運転 #ROS #arav #ビスペル pic.twitter.com/pP2bgkHfwD
小型の重機をCAN-BUS通信で遠隔操作

コロナの自粛で苦しむ旅行業に対し、ガイドを遠隔で行う技術支援を行いました。また、遠隔操作のための3D映像配信の製品化が大詰めとなります。
駿河湾フェリーとEVトゥクトゥクを活用した土肥リモートガイドの実証を行いました。清水港でトゥクトゥクと共に乗船し土肥港から運転しながら名所を巡ります。ガイドは清水港の駿河湾フェリー乗り場で仮設配信スタジオからリモートガイドを行いました。
沼津市内のリモートガイド実証です。
モニターツアーでリモートガイドの実地を重ねています。利用者の生の声が貴重。また、機材と運用の最適化が進みます。#トゥクトゥク #EV #2次交通 #旅行 pic.twitter.com/Im4D6YmUYx
— VISPELL LLC (@vispellllc) February 23, 2022
先日の遠隔ガイドシステムを使ったモニターツアーが記事になりました。#EV #2次交通 #ツアー #リモート pic.twitter.com/J4FDLw5vKs
— VISPELL LLC (@vispellllc) March 7, 2022
遠隔操作用3D映像配信システムの製品化に向け、様々な3D視聴できるデバイスをテストしました。
Acerの裸眼3D立体視ができるPCで単眼カメラ映像をリアルタイムに立体視させてピンセット操作のテストしました。
— VISPELL LLC (@vispellllc) August 23, 2022
営業さん経由でいくつか要望を出させてもらいました。#acer #エイサー @Acer # https://t.co/ielxT8d0PN pic.twitter.com/Um6atEw2mo
こちらは3D視聴できるプロジェクターです。赤外線信号による立体視を実現するメガネで視聴します。
建設業向けDXコミュニティ ON-SITE X の取り組みで、立体視ストリーミングのデモを行いました。
— VISPELL LLC (@vispellllc) September 15, 2022
7K3D映像を一部低画質化し低遅延で配信しています。
装着負担感の少ないプロジェクターと高没入感のHMDで視聴。
遠近感が強化され、遠隔操作時の「掴む刺す」作業がしやすくなります#建設DX @on_site_x pic.twitter.com/u131h53WGn
福島県大熊町のイベントで立体視遠隔操作の体験コーナーをお手伝いしました。
枝(障害物)が混ざった所から、うまい棒を掴んで箱に入れられたら持って帰れるという遊びです。
— VISPELL LLC (@vispellllc) November 5, 2022
立体視ストリーミングは、子供にも遠近感の支援ができているようです。 pic.twitter.com/aTJ7eJcfN0
3D視聴するデバイスとしてARグラスが登場
Nreal Air でラジコン遊び pic.twitter.com/elZtrhIw8u
— VISPELL LLC (@vispellllc) November 23, 2022
遠隔操作用立体視ストリーミングデバイス#ReHawk3D (リホークスリーディー)
— VISPELL LLC (@vispellllc) June 7, 2023
立体視操作で遠近感を体感ください。#操作スピード大幅アップします
リモコン化されている建機でデモ行っております。
お問い合わせはこちらまでhttps://t.co/iufUG6Ahnr#遠隔操作 #建機 #建設業 pic.twitter.com/QBF88xCdGe
3Dライブストリーミングでグラップル重機を遠隔操縦
— VISPELL LLC (@vispellllc) May 12, 2023
細い丸太を除外しています。#3Dライブストリーミング #nrealair #遠隔操縦 pic.twitter.com/FIRqaSD9uO
遠隔操作用立体視ストリーミングデバイスReHawk3Dの試験について、信濃毎日新聞で記事を掲載いただきました。https://t.co/R15s8k7wcb#遠隔操作 #立体視 #3D #ライブ配信 pic.twitter.com/sDmRdF0Vlk
— VISPELL LLC (@vispellllc) July 25, 2023
ReHawk3D(リホークスリーディー)のオペレーターズケースがリニューアルしました。
— VISPELL LLC (@vispellllc) September 6, 2023
利点は、Xreal Airを使いながら、スマホの給電、有線LAN接続による無線混戦地でも安定した長時間利用ができる点です。… https://t.co/8crIOqB5Ly pic.twitter.com/YDowGNBHlk
林業に初進出
本日は静岡駅近くで森林・林業先端技術セミナーに出展しております。#林業 #遠隔操作 #rehawk3d #立体視 pic.twitter.com/aDmqUvPmzS
— VISPELL LLC (@vispellllc) October 10, 2023
裸眼立体視モニターに対応
遠隔操作用3Dストリーミングデバイスの #ReHawk3D リホークスリーディーが裸眼立体視モニタの対応をします。
— VISPELL LLC (@vispellllc) December 12, 2023
より操縦者の装着負担を減らす試みです。
お問い合わせフォームはこちらですhttps://t.co/uJnKKNXEbb#遠隔操作 #重機 #建設機械 #生産性を落とさない遠隔操作のフェーズへ https://t.co/zVqT5oI5QC pic.twitter.com/vnKSpYDkTI
林業進出に伴い、多くの林業関係者から林業について多くの情報いただきました。その中で特に興味を惹かれた問題が木を育てる施業『造林』の領域で、現在でもほとんど人力作業だったことです。それはある原因が起点となっていました・・・
土ごと粉砕するので(石が多少あってもok)実用向きです。#高性能林業機械 #再造林 #地ごしらえ #下刈り https://t.co/Ep3Uv5IBs3 pic.twitter.com/cMEbclHNVK
— VISPELL LLC (@vispellllc) February 1, 2024
全粉砕地拵えを行った皆伐地はこのようになります。
イタリアへ出張しました。MDBの会長、社長へ日本とイタリアの林業の違い、日本の林業の課題をご説明し、自動化への協力をお願いしました。
イタリアMDBSRL社にて新工場の生産ラインを見学させていただき、Green Climber製品群「LVシリーズ」がなぜあれほどコンパクトなのに林業の過酷な環境でもパワーを発揮できるかよく分かりました。
— VISPELL LLC (@vispellllc) September 5, 2024
一言で言うと全部作っててガチだった。
でした。
保有する特許技術も謎を解消させてくれました。 pic.twitter.com/1Hw3uIsDlN
下刈りを自走式機械で行うとき、もし遠隔操作で事務所から操縦したらどのような映像を見ながら操作することになるでしょうか?・・・はい。これでは苗木が判別できず苗木を誤伐してしまうでしょう。下刈りを遠隔操作することは困難。自動化の検討を優先することになりました。
こちらヒノキの苗が2.5m間隔で植えられている間を歩いています。
— VISPELL LLC (@vispellllc) September 20, 2024
機械下刈りをするとしたら、機械の目線です。
苗わかりますか?#造林機械化 #林業 #高性能林業機械 #下刈り pic.twitter.com/4PFKhIEd4R
伐採後の地拵え前の現場がどれぐらい枝条残材が残るのか富士市有林を見学しました。

一部傾斜が40度になる斜面を粉砕地拵えする現場を見学しました。長野県佐久
弊社が参画する『下刈機械自動化コンソーシアム(i-SWM)』で、傾斜50度での地拵え実証を行いました。住友林業開発のウインチアシスト(テザー)を組み合わせマシンの操作に応じてケーブルの巻取り送り出しを自動で行っています。
弊社参加するコンソーシアムのニュースリリースです。
— VISPELL LLC (@vispellllc) February 7, 2025
【これまで困難とされてきた急傾斜地での無人林業作業に成功】 https://t.co/5R1jfaBfyZ

再造林皆伐地でインターネット接続を安定的に行うため、衛星インターネットサービスのStarlinkを導入することが考えられます。しかし、Starlinkから先のネットワーク構築を低コストかつ設置を容易にするには広域WiFi製品を応用して使うことが考えられます。無線周波数に応じて最大距離を通信できるようにアンテナリフターを開発。実験では約500mの距離でYoutube映像を視聴することができました。

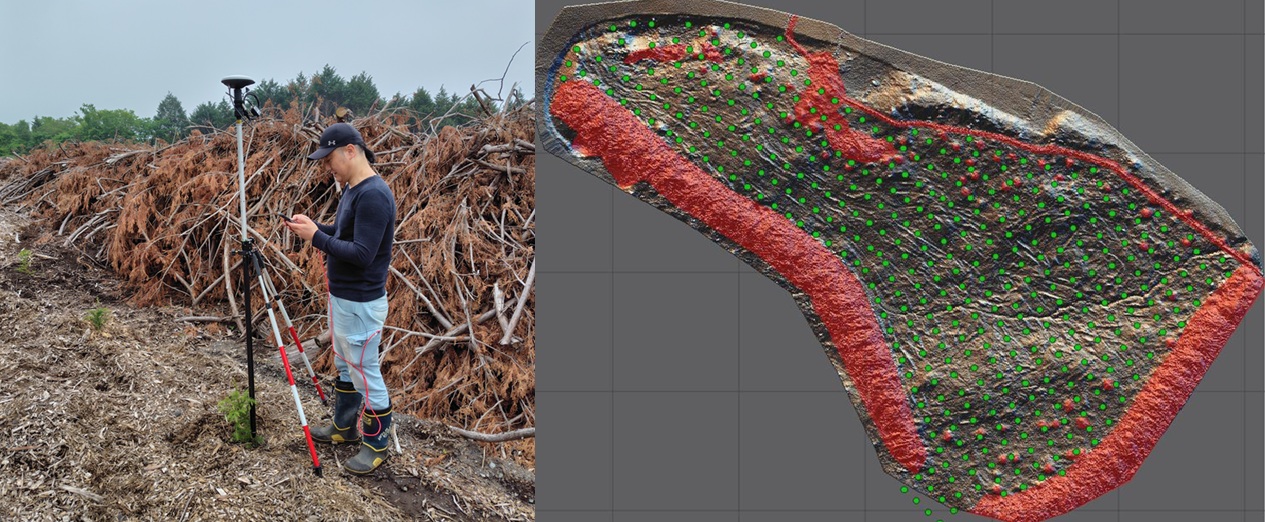
機械が通れる間隔(列間2.5m)で植えられた全粉砕地拵え実施皆伐地。次年度以降、自動下刈りを検証するフィールドとなります。

自動運転の走行ルートを作成するために苗木の位置を測量しました。ドローン写真測量(フォトグラメトリー)で作成されたオルソ画像に苗木位置を緑点でマッピングし、自動走行の障害物となる部分を赤色でマークした画像です。
令和7年度静岡県森林・林業技術研究発表会にて、富士地域林業イノベーション推進協議会と共に3年取り組んできました「下刈りの機械化のための自走式地拵え機による地拵えに関する検証」が3位の評価を頂きました。
列間2.5mで植栽された再造林地で、手動操作による機械下刈りを実施しました。

イタリアMDB社 LV300PRO の遠隔操作を実現しました。